Hemos hecho un código en bitboq para subir al coche.
El primer bloque que hicimos declaramos las variables, la primera era Sensor_izq=0 y el otro era Sensor_drch=0
Hicimos también un sensor llamado velocidad=60, aunque fuimos cambiando su número mientras que otros alumnos lo probaban.
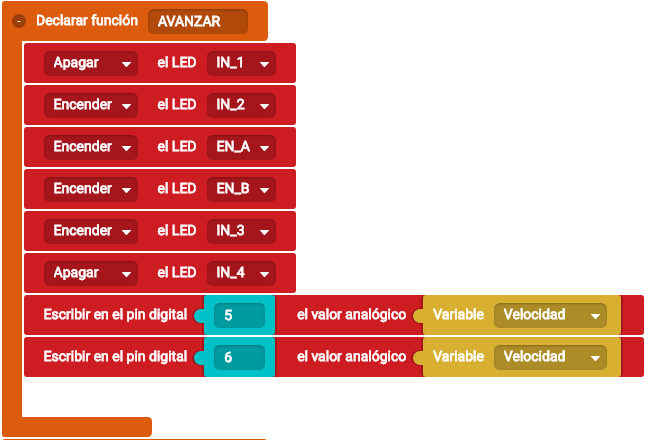
El segundo bloque lo llamamos avanzar y declaramos muchos leds.
IN1-----Pin 11
IN2-----Pin 10
IN3-----Pin 12
IN4-----Pin 14
ENA-----Pin 5
ENB-----Pin 6
Y según la función que querían en cada bloque se encienden unos o se apagan. Y así todos los bloques como se puede ver en las siguientes fotos.
Para girar al la izquierda hay que encender un IN de cada motor en este caso encendimos el IN 1 del ENA y el IN 3 del ENB.
Para girar a la derecha hacemos lo mismo que en la izquierda pero con los IN que apagamos.
Para detener simplemente apagamos todo y no ponemos velocidad.
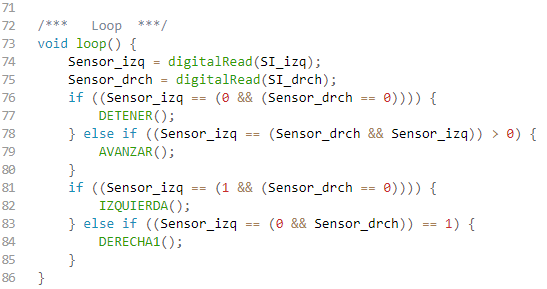
En el bucle principal tenemos que ejecutar las funciones que declaramos antes.
Si el sensor izq.=sensor dch. y el sensor dch.= izq---- Avanzar
Si el sensor izq. y dch. están en 0
Detener
Si encendemos solo el sensor izq.
Ejecutar izquierda
Si encendemos solo el sensor dch.
Ejecutar derecha
Código arduino:
Lo probamos en el coche de clase y nos funcionó en todos los circuitos con todas las curvas menos la de 90º. Hemos intentado hacer la propuesta para que girase pero no nos ha salido creo y prefiero no mandarla porque estará mal seguro, no sabia como poner en bloques "Cuando se salga de la línea"...
Bueno y este es el código de los bloques de antes: